Threading before C++11
Threading was possible before C++11. How did it work?
Simple example
The C++ standard only referred to single threaded programs before C++11. And yet all major operating systems and compilers supported multi-threading programs well before C++11.
On Windows a program can create threads with CreateThread and then a mutex
can be used to allow exclusive access to a resource. A mutex is created with
CreateMutex which returns a HANDLE. To get exclusive access a thread will
wait for the mutex HANDLE. WaitForsingleobject is one of the many
functions that can wait for Windows HANDLEs. To end the exclusive access the
thread calls ReleaseMutex.
Below is an example that tries to show how compilers handled multi-threading before C++11, but it’s pointless outside this purpose (it’s also a bad example of error handling and resource management).
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
#include <Windows.h>
#include <iostream>
int fib(int x)
{
if (x < 2) return 1;
return fib(x - 1) + fib(x - 2);
}
DWORD WINAPI ThreadFn(LPVOID)
{
return 0;
}
int main()
{
int result = fib(39);
auto m = ::CreateMutexW(NULL,NULL,NULL);
result = fib(40);
auto h = ::CreateThread(NULL, 0, ThreadFn, &result, 0, NULL);
result = fib(41);
::WaitForSingleObject(m, INFINITE);
result = fib(42);
::ReleaseMutex(m);
::WaitForSingleObject(h, INFINITE);
std::cout << result << '\n';
return 0;
}
Discussion
From the point of view of the compiler, all the Windows functions we use in the
example (CreateMutex, CreateThread, WaitForSingleObject, ReleaseMutex)
are implemented in external DLLs, the compiler has no visibility into their
implementation, they could have side effects. I’ll call them external
functions.
To start with, the relative order of external functions is preserved.
Also typically when threads access a common piece of data they need to know the
address of that data, for example pass it somehow. The example above simulates
that by passing the address of the result variable from the main thread to
the CreateThread function. This being a dummy example it does not really use
it from the created thread, but it’s enough to show the compiler behaviour.
From the point of view of the compiler, once the address of a variable is passed to a external function, it has to treat access to that variable more carefully, because it needs to assume that the external functions can hold that address and access it. That variable has to have an actual address in memory, can’t be manipulated solely in CPU registers, and the compiler cannot rely on the value from a register across a call to an external function. Instead values have to be read from memory after an external function call, and written to memory before an external function call.
For example the result variable has to have a memory location to which a
mov assembly instruction to that memory location has to be generated before
any call assembly instruction into an external function.
This does not extend to code that the compiler has solely visibility of, such
as the calculation performed by the fib function. The compiler can re-order
that, as long as it’s done before the assignment to result.
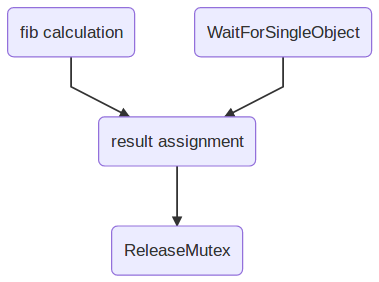
For example the dependency graph that the compiler uses for the
WaitForSingleObject to ReleaseMutex section looks like below. The fib
calculation can be reordered before WaitForSingleObject, but the assignment
to result is sandwiched between WaitForSingleObject and ReleaseMutex.
The compiler also has to identify more indirect cases, to start with the
result could have been member of a struct and the address of the struct
instance passed across. Or it could have been a global variable.
The compiler’s job is limited. It is the job of the external functions to
generate the appropriate memory fences (either explicitly or implicitly). E.g.
WriteForSingleObject for a mutex should at least generate a read-acquire
fence and ReleaseMutex should at least generate a write-release fence.
As a side note: the Windows mutex is a relatively heavy approach which has the
advantage that it can be used across processes. For a lightweight approach
inside the same process there are Windows critical sections or std::mutex
from C++11.
The problem before C++11 is that if developers tried to provide themselves multi-threading primitives there was little formal guarantees from the compiler, operating system and processor specifications. With regards to multi-threading in particular just because the code seems to work is not guarantee that it always really works.
Conclusion
Before C++11, the C++ standard only referred to single threaded applications. While in practice multi-threaded applications were written, and compilers restricted optimisations around external functions, someone had to implement those functions. Threading cannot be implemented as a library without compiler support. Without clear specifications even experts struggled, examples were Linux kernel locks, Java VM garbage collectors etc.
Appendix: generated code
For reference, here is an example of the generated assembly code for the example above:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
17: int result = fib(39);
mov ecx,26h
call fib (0F01000h)
mov ecx,25h
mov esi,eax
call fib (0F01000h)
18: auto m = ::CreateMutexW(NULL, NULL, NULL);
push 0
push 0
17: int result = fib(39);
add eax,esi
18: auto m = ::CreateMutexW(NULL, NULL, NULL);
push 0
mov dword ptr [result],eax
call dword ptr [__imp__CreateMutexW@12 (0F03000h)]
19: result = fib(40);
mov ecx,27h
18: auto m = ::CreateMutexW(NULL, NULL, NULL);
mov dword ptr [ebp-0Ch],eax
19: result = fib(40);
call fib (0F01000h)
20: auto h = ::CreateThread(NULL, 0, ThreadFn, &result, 0, NULL);
push 0
push 0
19: result = fib(40);
mov edi,eax
20: auto h = ::CreateThread(NULL, 0, ThreadFn, &result, 0, NULL);
lea eax,[result]
push eax
push offset ThreadFn (0F01030h)
push 0
19: result = fib(40);
lea ecx,[edi+esi]
20: auto h = ::CreateThread(NULL, 0, ThreadFn, &result, 0, NULL);
push 0
mov dword ptr [result],ecx
call dword ptr [__imp__CreateThread@24 (0F0300Ch)]
21: result = fib(41);
mov ecx,28h
20: auto h = ::CreateThread(NULL, 0, ThreadFn, &result, 0, NULL);
mov ebx,eax
21: result = fib(41);
call fib (0F01000h)
mov esi,eax
22: ::WaitForSingleObject(m, INFINITE);
push 0FFFFFFFFh
push dword ptr [m]
21: result = fib(41);
lea ecx,[esi+edi]
22: ::WaitForSingleObject(m, INFINITE);
mov edi,dword ptr [__imp__WaitForSingleObject@8 (0F03004h)]
mov dword ptr [result],ecx
call edi
23: result = fib(42);
mov ecx,29h
call fib (0F01000h)
24: ::ReleaseMutex(m);
push dword ptr [m]
23: result = fib(42);
add eax,esi
mov dword ptr [result],eax
24: ::ReleaseMutex(m);
call dword ptr [__imp__ReleaseMutex@4 (0F03008h)]
25: ::WaitForSingleObject(h, INFINITE);
push 0FFFFFFFFh
push ebx
call edi
26: std::cout << result << '\n';
push dword ptr [result]
mov ecx,dword ptr [_imp_?cout@std@@3V?$basic_ostream@DU?$char_traits@D@std@@@1@A (0F03058h)]
call dword ptr [__imp_std::basic_ostream<char,std::char_traits<char> >::operator<< (0F03044h)]
mov ecx,eax
call std::operator<<<std::char_traits<char> > (0F011D0h)
References
- Hans-J. Boehm: Threads Cannot be Implemented as a Library, 12 Nov 2004